

该工作以“Animating hydrogel knotbots with topology-invoked self-regulation”发表在Nature Communications上。浙江大学博士生朱清丽、南方科技大学硕士生刘伟轩为论文共同第一作者,浙江大学郑强、吴子良以及南方科技大学洪伟为论文共同通讯作者。该研究得到了国家自然科学基金等项目以及上海光源的支持。
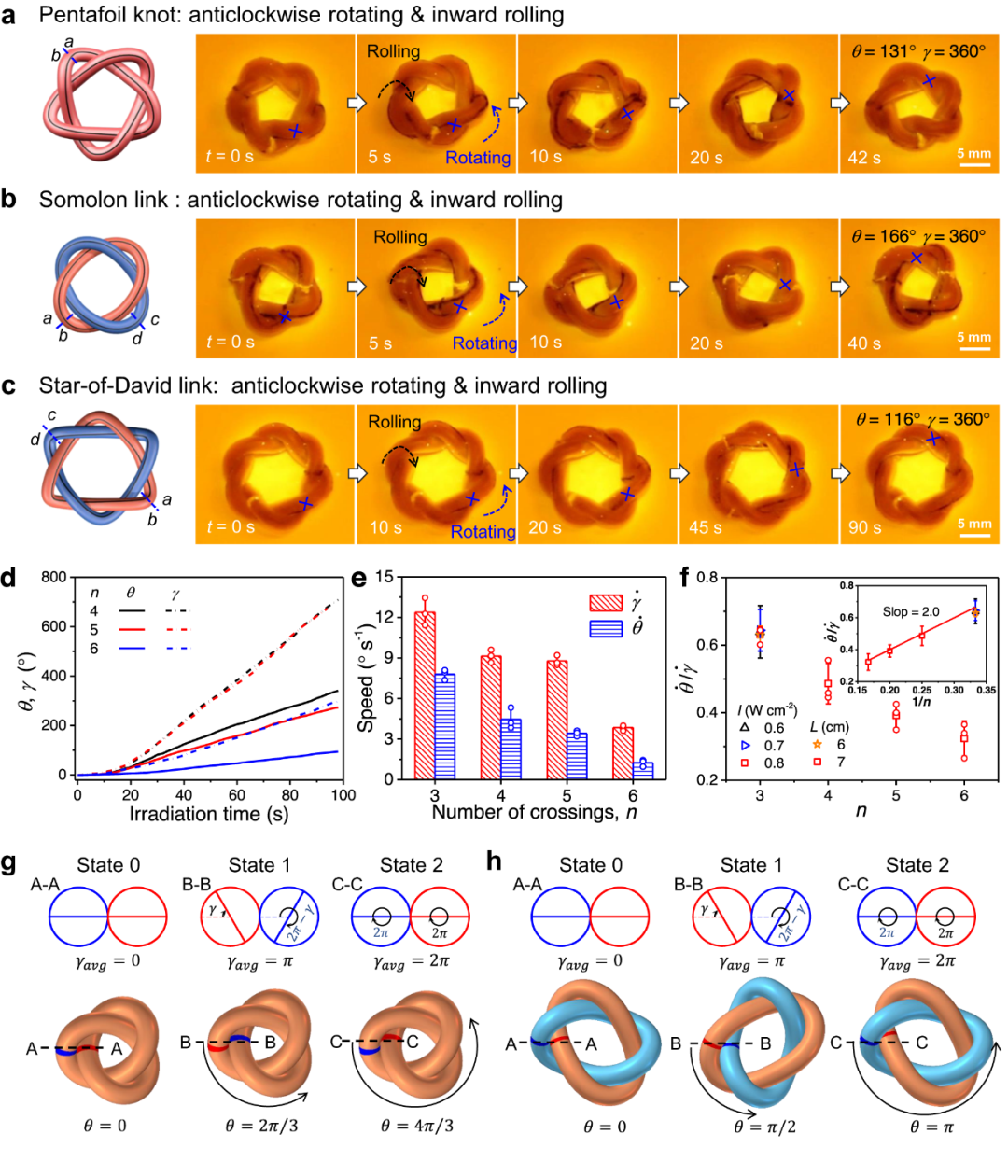
作者利用各向异性水凝胶制备了不同绳结结构的拓扑机器人,包括圆环、三叶结、五叶节、所罗门结(Solomon link)、大卫之星结(Star-of-David link),在静态光照下实现了持续的滚动(rolling)、旋转(rotation)等运动。研究了绳结尺寸、手性以及光照强度、方向等因素对拓扑机器人运动机能的影响规律。通过理论模型进一步证实,该自我调节的运动机制源于拓扑结构诱导的预应变、快速可逆的形状变化以及自遮蔽效应的协同作用。此类拓扑机器人可用于执行特定任务,如旋转齿轮、物品输运等。
浙江大学官网教师个人主页介绍,郑强1995年留学归国后在浙江大学创建了中国第一个高分子动态流变学研究学术团队。在多相/多组分复杂高分子填充体系流变学研究方面取得一系列成果,提出被国际上誉为“The Model of Song and Zheng”的流变“两相”模型。他是浙江大学化学一级国家重点学科主要负责人、高分子化学与物理国家二级重点学科主要学术带头人。

郑强近年来主持国家重点基础研究发展规划(973)课题、国家高技术研究发展计划(863)、国家自然科学基金等国家级研究项目16项,在Progress in Materials Science、ACS Nona、Advanced Functional materials、Angewandte Chemie International Deition、Macromolecules、J.Rheo、Soft Matter、Polymer等重要学术刊物上发表论文519余篇,其中SCI收录论文489余篇,SCI他引4600余次;授权国家发明专利38项。在国际学术会议上作特邀报告6次,邀请报告40余次,会议组织委员会或分会主席30余次。获宝钢优秀教师奖(2002)、中国化学会高分子基础研究王葆仁奖(2005),以第1完成人获省级科技一等奖3项、教育部自然科学二等奖1项、浙江省优秀教学成果奖1项。培养了近百名硕博士生。
与郑强一同担任上述论文通讯作者的吴子良也是一位高分子的知名学者。

公开资料显示,吴子良,浙江大学高分子科学与工程学系研究员。2003年毕业于浙江大学化工系,2006年于华东理工大学获工学硕士学位,2010年北海道大学获理学博士学位。之后分别在多伦多大学、居里研究所、北海道大学从事博士后研究工作。2013年加入浙江大学高分子系。主要从事仿生与功能性高分子软材料方面的研究,已在Nat.Commun.、Sci.Adv.、J.Am.Chem.Soc.、Adv.Mater.、Angew.Chem.Int.Ed.等期刊上发表论文数十篇。
赞一个


更有众多热门

